
Photo 1 - Geoff Stait driving Wedge at West Huntspill

Photo 2 - The Brutalist at Vivary Park Taunton
Long ago, Somerset team Julie and Jon, joined the local model engineers and started driving their Polly steam locomotive on the miniature railway in a local park, giving rides to the public a few times a month during the summer.
Driving Polly in the park was fun, but too much time was spent keeping it clean and in good working order. Maybe an electric locomotive could be a time saver. Critical eyes were cast over visiting electrics, inspiring thoughts about creating something robust and to high standards. A low maintenance design, to be more reliable and more efficient than the norm, using more up to date technology.
This led to thinking of using modern brushless motors, rather than old style carbon brushed DC motors seen in other locos. With only two bearings and no other moving parts in contact, brushless motors are inherently more compact, efficient and reliable. They're also quite different, a little like a DC motor turned inside out with some parts thrown away, the magnets on the rotor with the windings closer to the outside on the stator. Often called brushless DC motors, it's more accurate to think of them as permanent magnet synchronous three phase, AC motors, and we'll need some new electronics to make them work at all.
‘The Wedge’ was the first five inch gauge brushless electric locomotive to emerge from the workshop, nearly a decade ago, a design brief being to produce a locomotive “not less powerful than the Polly”. Photo 1 shows respected steam expert Geoff Stait quite enjoying a test drive at West Huntspill in October 2015. As a regular runner ever since, The Wedge has given hundreds of hours and hundreds of miles of trouble free service. With grease packed roller axle bearings, the minimal maintenance regime has been an infrequent look for anything coming loose, and a drop of oil to eight plain bronze bearings. Power is from a pair of 50 amp hour mobility scooter batteries. These remain permanently fitted, with a socket provided on the control panel for a scooter charger. Observing a strict routine of recharging immediately on return from any outing has kept the original batteries in usable condition all this time.
The electronics used in The Wedge were designed and assembled to prove the effectiveness of brushless motors and drives, and as a platform for further development. As such, cost effectiveness was not a particular consideration and the whole construction cost was a little higher than for similarly powered kits or ready-built locos available at the time.
The economic case ever since has been constantly moving in favour of brushless designs.
Photo 1 - Geoff Stait driving Wedge at West Huntspill
Photo 2 - The Brutalist at Vivary Park Taunton
At a recent special event in the park The Wedge was on duty for a full seven hours. Although the acrylic body shell does a perfect job at keeping water out from above, wheels on wet rails flick rusty nastiness up inside soaking some of the exposed electronics within. This is a known issue, and a few times an old toothbrush has been used removing rusty crud deposits. After a brief rain shower that afternoon, performance had become ‘a bit jerky’, dirty water having got to where it shouldn’t. Lifting the body shell off, and running the next few laps letting the air get in to dry it all soon had it back to normal.
A question often asked, "how long do the batteries last"? We can now honestly answer; “seven hours, or maybe more”. Regular public running sessions are normally only three hours, and other electrics have often bowed out in less time than this with failing batteries. It is surprising how much more efficient brushless motors can be.
Building upon experience, a second brushless design, ‘The Brutalist’ or ‘Brute’, followed on two years behind The Wedge. This petrol-electric has two sets of bogies to run on five, or seven-and-a-quarter-inch gauges. Photo 2 shows The Brute sporting five inch bogies at Vivary Park, Taunton. The power unit is a 120cc Honda four-stroke engine driving a 2kW brushless motor as a generator. This has proved to be quite sufficient for heavy-duty work on the larger gauge, having performed some public running at Ashton Court Railway, Bristol. New electronic motor drives and controllers were designed with a view to making them available commercially. Each Brute bogie is fitted with one STM3EMC dual brushless motor driver controller (Photo 3). This keeps the wiring tidy and makes for easy bogie removal. Both locomotives are driven by ‘touch-screen’, and both use the ‘six-step’ algorithm for motor drive. Photo 4 shows the motors used in The Wedge, and in both bogie designs of The Brute. They are rated at 105, 220 and 660 watt respectively.
Being quite big and heavy, ‘The Brute’ doesn’t get too many outings, but it has a perfect reliability record to date. Start the engine and go.
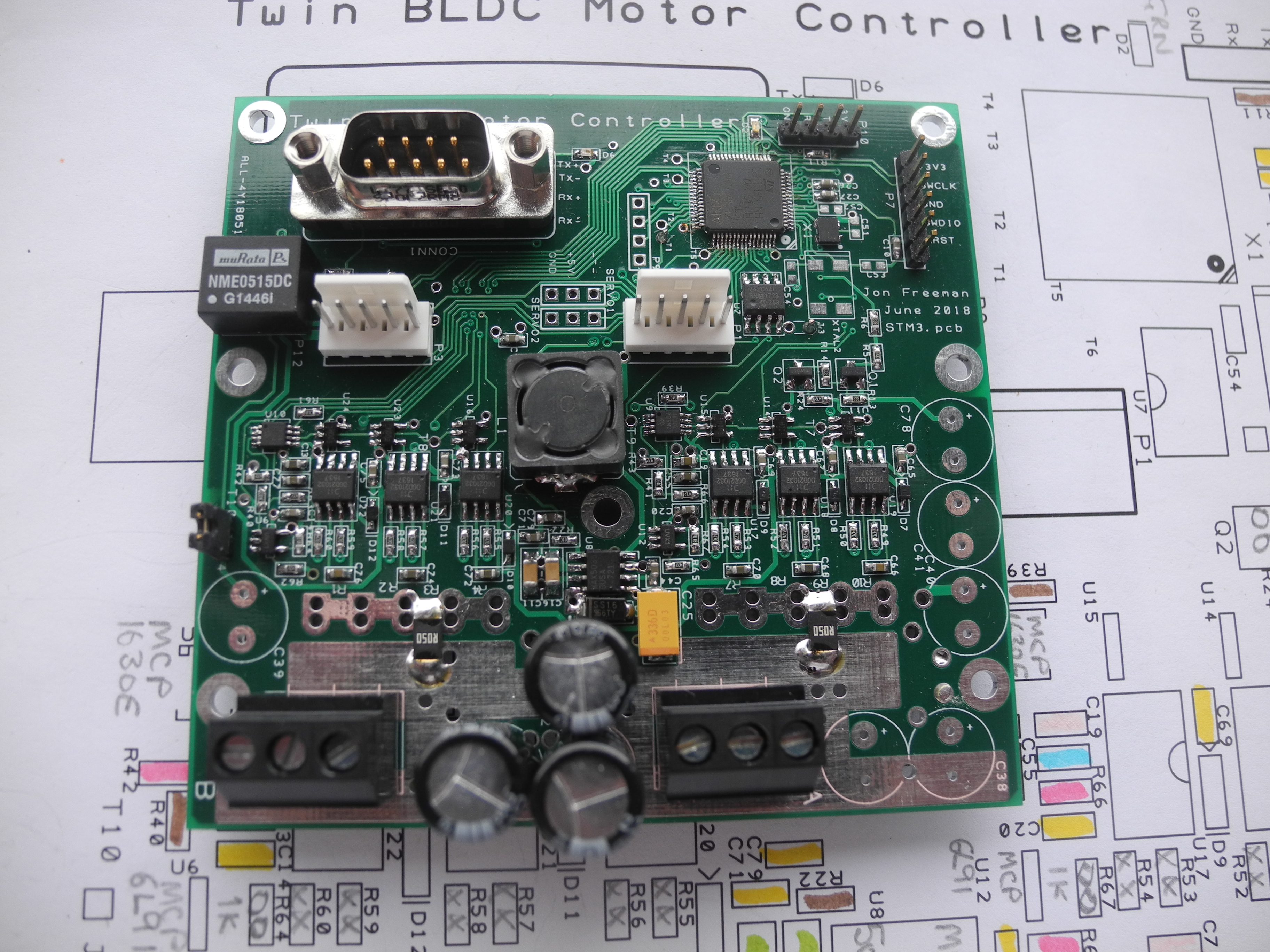
Photo 3 - STM3_EMC Dual Brushless Motor Controller

Photo 4 - Motors used in Wedge and Brute
By design, neither of these locomotives bear any resemblance to any mainline prototype. Too often huddles of gricers have been seen gathering around someone’s pride and joy, stroking their chins, mumbling and tutting about how awfully wrong it all is. Thankfully, most of these miserable wretches are so appalled at the sight of ‘Wedge’ and ‘Brutalist’, they tend to keep well out of the way. Good!
Breaking with tradition, under construction at the moment, a locomotive to externally resemble a ‘Baby Deltic’. This is a once-in-a-lifetime attempt at proper modelling, with the aim of building a reliable hard-working, rather than fine-scale showcase locomotive. With no volunteers coming forward to produce a working scale model of a Napier Deltic T9-29 nine cylinder engine, the power source will be a commercial 700 watt petrol inverter-generator powered by a 40cc single-cylinder four-stroke petrol engine. This just about fits, after taking very minor liberties with scale. The 240 volt AC from this is converted down to 27 volt DC using two VOF-350 industrial power supplies from Farnell (Photo 5). From there on, the ‘first fix’ electronics uses all the same kit as in The Brute with modifications to make the locomotive radio controlled. This is the same as currently used by Tim Coles in his 18100 Turbine loco. The Baby Deltic is now fully working, and complete except for the body shell and 3D printed cabs (much more on these in a future article!). The chassis has successfully completed test runs at Bristol (photo 6) and Taunton.
Still something of a novelty ten years ago, brushless motors are rapidly sweeping the board, relegating brushed DC motors to ‘dinosaur’ status throughout industry. Alongside this, the electronics industry has invested in development of many highly integrated, low cost motor drive solutions. A fresh look at this latest technology encourages adoption of simplified, higher performance, lower cost control designs for this latest locomotive.
An important step in the process of designing for reliability is in understanding likely modes of failure and their consequences. Locomotives of these scales may take harsh treatment, and we could draw up a list of likely failures. Seized axle, shorted or broken wires, slipping drive couplings, – and doubtless many others.
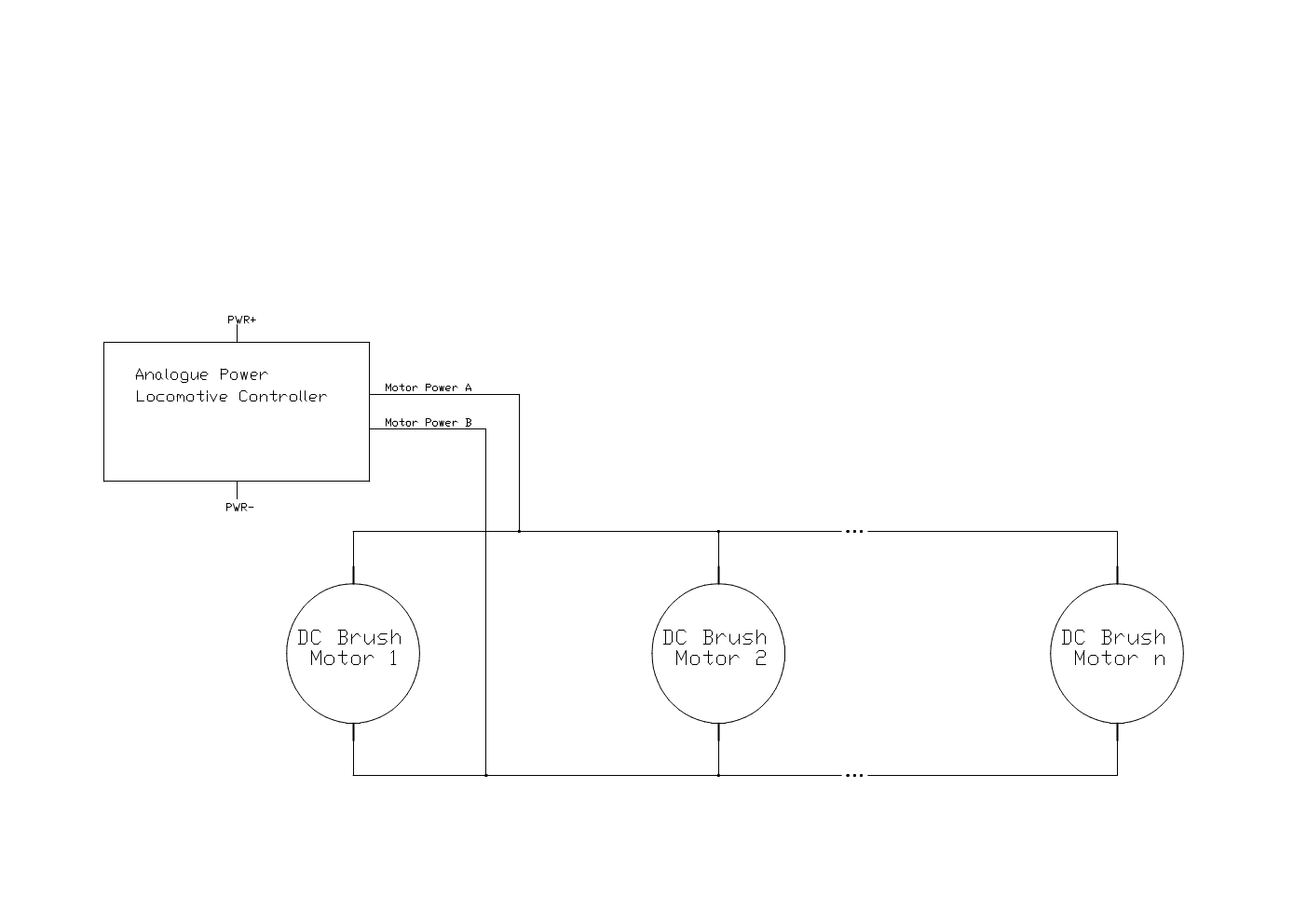
Figure 1 - Dinosaur DC Motors
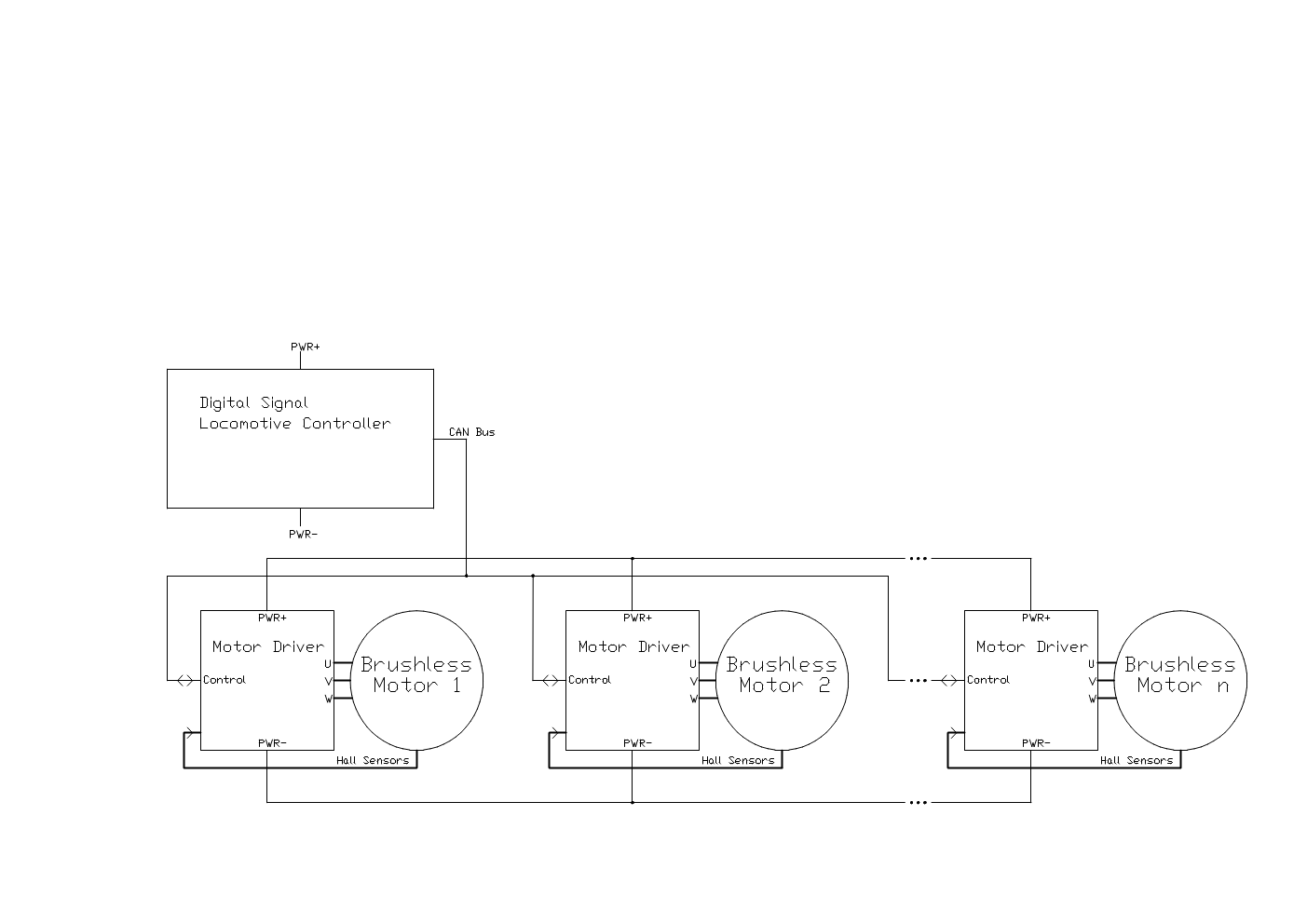
Figure 2 - Safe Brushless Motor Scheme
With minor variations, all other locomotives seen have been configured as shown in Figure 1. A number of brushed DC motors wired together to a single power controller. This may work well enough while everything runs sweetly with motors sharing power equally between them, but there is little or no resilience to any likely failures. The weakness is that any fault will upset the balance, which has consequences.
A stalled motor may draw a much higher than rated current leading to damage or burn-out. As another real example, recently on the club track a two motor loco was seen trailing plumes of smoke. Somehow one motor had become disconnected, allowing twice rated power to cook and burn the other. Which ever way we look at it, the open loop, single-controller multi-motor model of Figure 1, is unreliable by design.
Figure 2 illustrates the design topology we are moved towards in using brushless motors. Each motor works with its own intelligent motor drive circuit, consisting of six power transistor electronic switches providing motor power, and a microcontroller overseeing operations. Any motor problem is managed locally and safely within its own driver, without affecting any other motors or motor drives. All of this with virtually no chance of letting any smoke out. The locomotive controller has been simplified by shifting all the power electronics closer to the motors, while capability has been included for data communications. Modern microcontrollers come with a selection of inbuilt data communication methods, the one chosen for ongoing work will be ‘CAN Bus’. The loco controller now sends digital commands to the motor drives, which may respond with status information. Any alarm or problem may then be displayed on the locomotive control panel.
On The Wedge, for example, the control panel display includes a simple quad bar chart section (photo 7). This indicates the measured speeds of each of the four motors. The occasional glance while driving to see them all about the same is sufficient to know that all’s well.
The brushless motors used have eight wires. Three heavy wires for the motor power phases, and five finer wires to do with three internal Hall effect sensors which provide information to the motor driver about the motor shaft angle at any instant. Not all brushless drives use sensors, but they are essential to the ‘six-step’ algorithm that works very well for our purposes. It can be a little painful routeing all these wires within a loco, but as motor drives get smaller so it becomes easier to mount them on or at least close to, the motors. This localises and keeps wiring tidy, individual motor drivers then being easily connected together and wired to the loco controller.
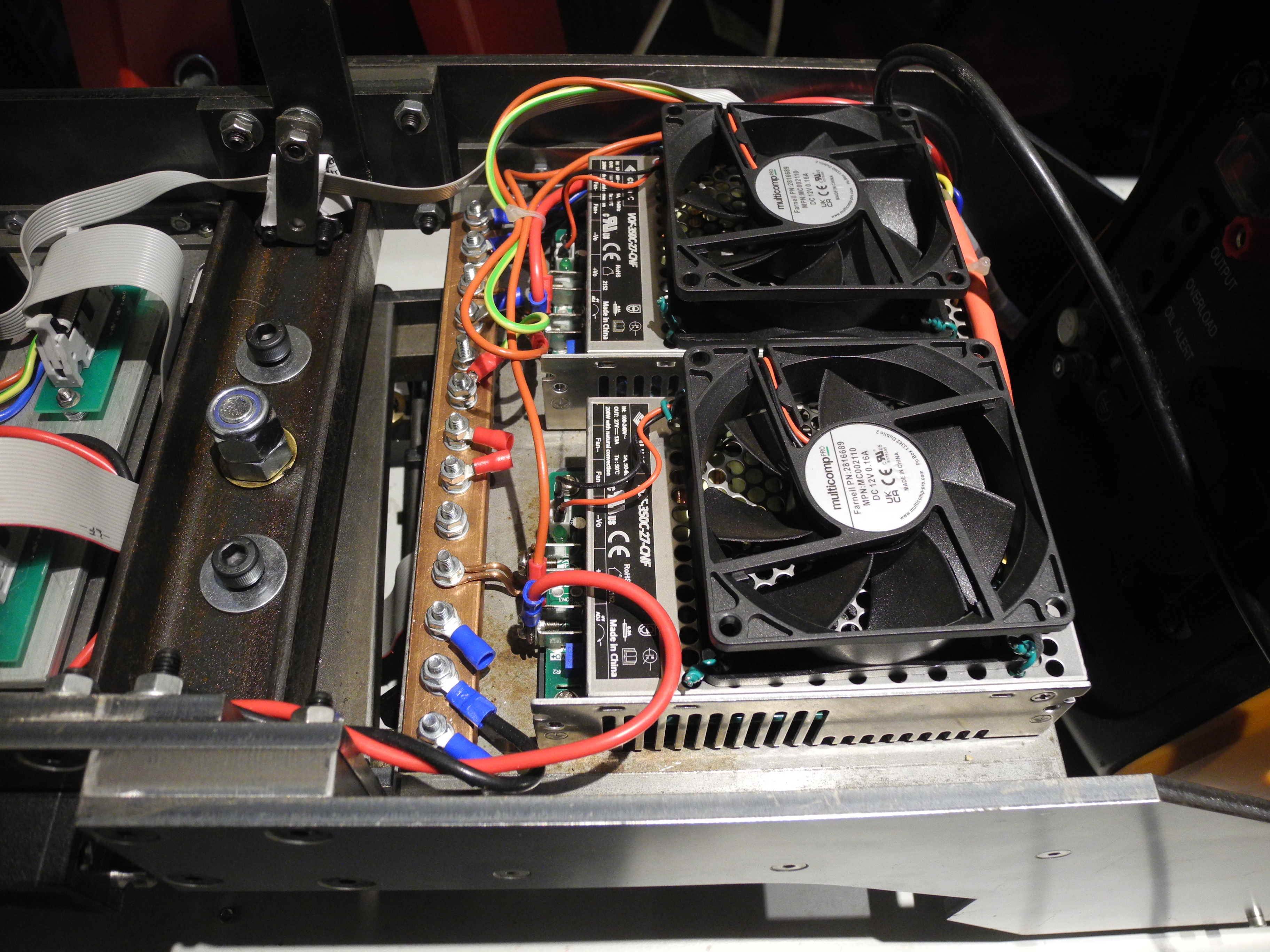
Photo 5 - Baby Deltic Power Supplies

Photo 6 - Baby Deltic test run at Bristol
Back in 2018 the STM3EMC dual brushless motor controller was released. Designed using general purpose electronics of the day, these boards used quite a large number of small components, and offered little change out of a hundred pounds per motor. These are used in ‘The Brute’, and in the Baby Deltic to start with. Selling in admittedly small numbers, reliability has proved to be good with none ever being returned for any reason. Get out the loco, drop it on the track and hit the controls. It all just works without a worry.
The latest in electronics provide significant cost and space saving opportunities. For example, measuring only 9mm square, the STSPIN32G4 system on a chip offering from S T Microelectronics comprises a high performance microcontroller, together with other components optimised for motor drivers. Even in small quantities, it costs about the same as a pint, down the pub. One of these on a circuit board with six power switching transistors, and a sprinkling of other small components, and we have all the hardware in place. With on board configuration memory, motors will be driven safely within manufacturers limits, while monitoring performance and responding safely to any abnormal or fault conditions. This motor drive hardware once proved on the bench, will be built initially into the Baby Deltic, and to upgrade The Wedge and The Brute in due course.
Building electronics using these tiny surface-mount components is no longer a realistic task for the hobbyist. The 9mm square controller chip has 64 connections with a 0.5mm spacing, and they’re all underneath, where you couldn’t get a soldering iron, even if you wanted to! Fortunately there’s a local company with all the proper kit who can assemble circuit boards for us at a reasonable rate.
Not much works without software these days, motor drivers included, and over time a library of useful motor control and train driving code has been built, incorporating a lot of good feedback from users. This includes the idea of “driving to limits”. In the motor driver, maximum values for voltage, current and speed are set. This provides total motor protection, from the electrical side at least. A set of variable ‘working limits’ are used in motor control. These working limits may be individually set to any value from zero to the maximum limit set. This enables a vast choice of control methods, some of which may be useful in traction applications.
For example, with any two of these variable limits set to maximum, the loco can be controlled by varying the third between zero and max. This opens the way for new, possibly better or more interesting, ways of driving. For example driving by varying the voltage limit gives a driving experience similar to that of a classic dinosaur DC motor and controller setup. Driving by varying the speed limit is similar requiring even less driver brain activity, but arguably more interesting is driving by varying the current, or torque, limit. This gives an altogether different feel giving the driver more of a sense of what’s being asked of the loco. With torque limit driving, the driver will need to set the control high when pulling away or climbing a gradient, and maybe turning it down to zero elsewhere on the track. It would teach the driver something about the track if nothing else.
Work is proceeding towards getting the new motor drive electronics running the ‘six-step’ algorithm so that new controllers can be almost seamlessly retro-fitted. This leaves scope for future development of software using other algorithms to possibly squeeze a little extra performance and efficiency.
With no space left in the shed, there will be no more locomotives after Baby Deltic 5 9 1 4. This last one's for Julie.
..